Référence du système
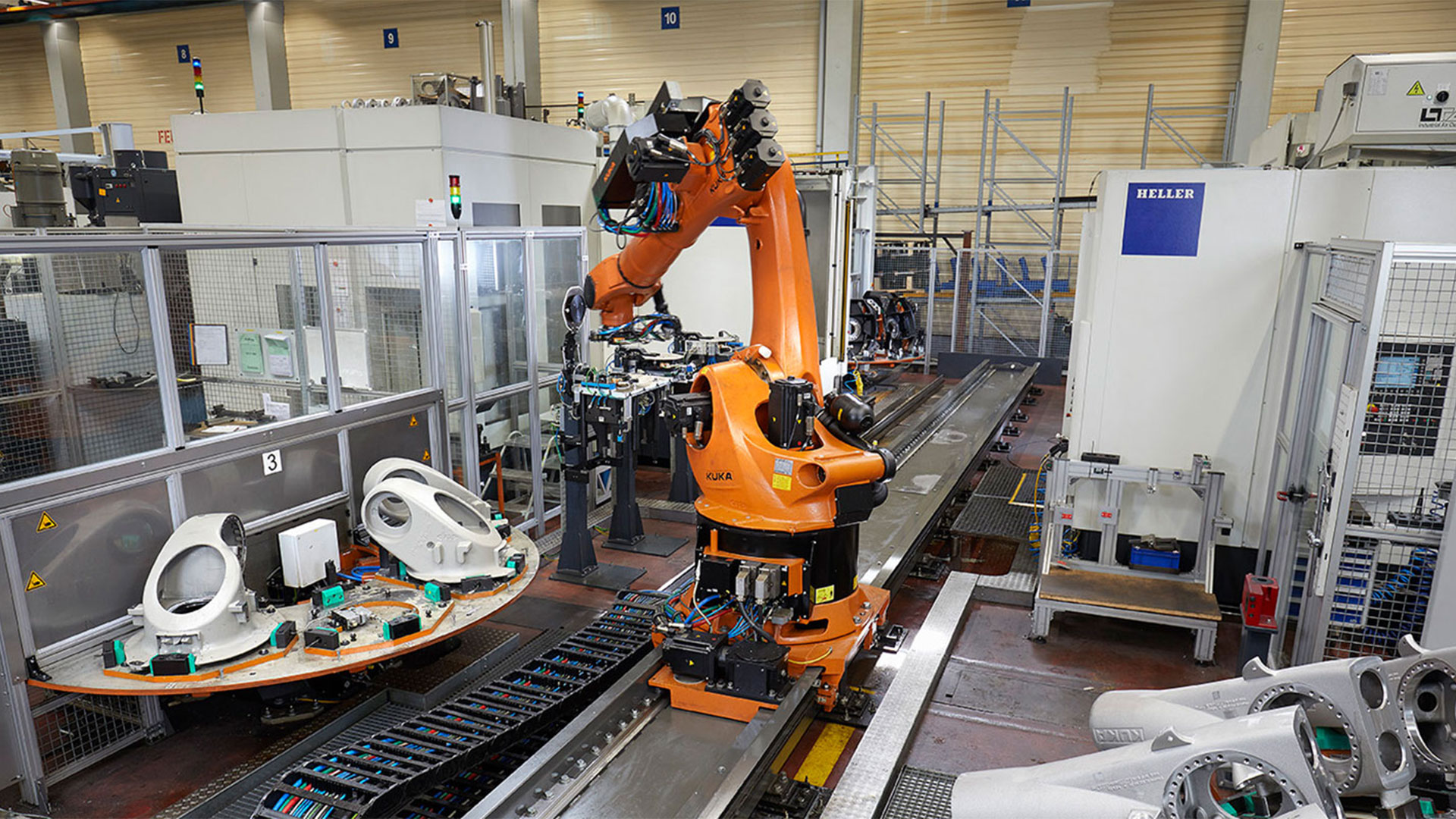
Système de manipulation pour boîtier de robot
Solutions système | Solutions robotiques | Robot industriel
Changeurs d‘outils
Série WWR1000

- Changeur pour charge lourde pouvant encaisser des couples jusqu'à 12000 Nm
- Poids recommandé jusqu´à 1000 kg
Pinces parallèles deux mors
Série GP400

- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension
1. Changeurs d’outil

- Changeur pour charge lourde pouvant encaisser des couples jusqu'à 12000 Nm
- Poids recommandé jusqu´à 1000 kg
2. Pinces parallèles deux mors

- Grande force de préhension par un transfert optimal de la force d´entrainement en force de préhension

Défi
Trois centres d'usinage devaient être reliés à un robot. Comme l'automatisation a été ajoutée ultérieurement, l'espace nécessaire et donc la taille du robot étaient limités. De plus, les machines devaient pouvoir traiter une très grande variété de pièces.
Solution
En raison de la diversité des pièces, un changement automatique des pinces a été utilisé. Le poids des pinces a été optimisé, ce qui a permis d'utiliser un robot compact.
Faits saillants et données techniques
 IP40
IP40 Pneumatiques
Pneumatiques Préhension externe
Préhension externe Préhension interne
Préhension interne
Données techniques
| Type d’entraînement | PNEU |
| Force de préhension max. | 6600 [N] |
| Concept de préhension | FORM |
| Protection de la préhension | KLE |
| Course max. | 200 [mm] |
| Classe IP | IP40 |
| Poids système | 112 [kg] |
Composants standard intégrés